Métodos de un paso
Los métodos de un paso tienen por objetivo obtener una aproximación de la solución de un problema bien planteado de valor inicial en cada punto de la malla, basándose en el resultado obtenido para el punto anterior.
Se desarrollan aquí los métodos Taylor (incluyendo Euler), y de Runge Kutta. Para ver el detalle de cada uno de los métodos, hacer click en cada uno de los siguientes vínculos. Para volver a esta página, hacer click en la solapa "métodos de un paso".
¿Cómo decidir qué método aplicar?
Hay dos cuestiones importantes que deben tenerse en cuenta al evaluar un algoritmo:
-
El esfuerzo computacional requerido para ejecutarlo.
-
La precisión que este esfuerzo produce.
Para los algoritmos vistos, el mayor esfuerzo se presenta en la evaluación de f. El algoritmo de Euler hace una evaluación de f por paso y el de RK4 hace cuatro, mientras que los de Taylor, tienen la complicación de evaluar las derivadas de f en cada paso. Por esta razón, y dado que un método de Runge-Kutta de orden m tiene la misma precisión que el método de Taylor de igual orden, es que los métodos de Taylor no se utilizan con fines prácticos.
Por lo dicho anteriormente, el método RK4 requiere cuatro veces más
esfuerzo por paso. Este hecho puede resultar engañoso ya que suele
obtenerse con pocos pasos de RK4 la misma precisión que con cientos del
método de Euler. Por ejemplo, analicemos los resultados obtenidos al
aplicar ambos procedimientos en el siguiente PVI:
|
|
|
La solución exacta de este problema está dada por y = 2 + 2 t + et. El valor aproximado de y(1) obtenido con los métodos de Euler y Runge Kutta y con distintos pasos para cada uno de ellos, arrojó los resultados tabulados en la tabla siguiente:
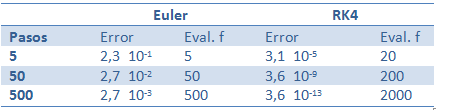
Se observa en esta tabla que al reducir el tamaño del paso en un factor 10, se reduce el error un factor 10 para el método de Euler, y un factor 10000 para el método de Runge-Kutta de orden 4. Esto es consecuencia del error global de cada método.
Se ve en esta ecuación que la solución discreta va a ser acotada siempre que la constante 1-h sea menor a uno en valor absoluto. Esto implica que h debe ser menor a 2, aunque el comportamiento óptimo se da para valores de h entre 0 y 1. Por lo tanto, la solución obtenida con el método de Euler será estable siempre que h sea menor que 2. El hecho de que la estabilidad del método dependa del valor de h, hace que el método sea condicionalmente estable.
Este análisis de estabilidad puede hacerse sólo para ecuaciones diferenciales lineales. En el caso de ecuaciones diferenciales no lineales, deben primero linealizarse localmente, y realizar un análisis de estabilidad en la ecuación de diferencias que aproxima a la ecuación diferencial linealizada.