
Se quiere analizar si existen vectores x (distintos del nulo) que al aplicarle la transformación T no cambian su dirección, pudiendo eventualmente cambiar su sentido o módulo. Es decir, el problema que se plantea es el de encontrar vectores x tales que T(x) = λ x donde λ Є R.
Como ya se ha visto, para calcular los autovalores asociados a la matriz de transformación T es necesario resolver el sistema:
Para obtener las soluciones no triviales, el sistema deberá ser compatible indeterminado, para lo cual se plantea que la matriz de coeficientes del sistema sea singular:
|
|
(1) |
La solución de (1) está dada por:
![]()
Si λ1= -2, el sistema compatible indeterminado es:
|
|
(2) |
La solución de (2) son los pares de la forma (x1, -2x1)t . Por lo tanto, el vector x1 = (1, -2)t, o cualquier vector múltiplo de éste, es autovector del autovalor λ1= -2. Esto es fácil de verificar, sólo basta plantear:

Esta última igualdad expresa que T(x1) = -2 x1, es decir, si al vector x1 se le aplica la transformación T, no cambia su dirección pero sí su sentido y también aumenta su longitud al doble del vector original. Se puede ver esto en la figura 1.
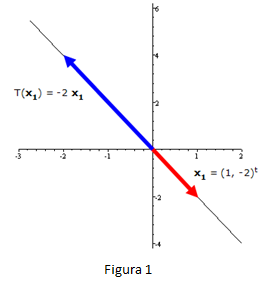
El vector x1 determina la dirección de una recta r1 que pasa por el origen de coordenadas. Por esta razón, geométricamente, se puede pensar que T es una transformación lineal que refleja cualquier vector x de r1 respecto al origen de coordenadas y lo dilata en un factor 2.
Si λ2= 3, el sistema compatible indeterminado es:
|
|
(3) |
La solución de (3) son los pares de la forma (2x2, x2)t . Por lo tanto, el vector x2 = (2, 1)t, o cualquier vector múltiplo de éste, es autovector del autovalor .
Esta última igualdad expresa que T(x2) = 3 x2, es decir, si al vector x2 se le aplica la transformación T, no cambia su dirección y tampoco su sentido, pero aumenta su longitud al triple del vector original. Se puede ver esto en la figura 2.
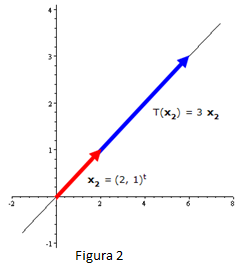
El vector x2 determina la dirección de una recta r2 que pasa por el origen de coordenadas. Por lo tanto, geométricamente, se puede pensar que T es una transformación lineal que dilata cualquier vector x de r2 en un factor 3.
¿Qué ocurre si se aplica la transformación lineal T a otros vectores que no estén en la dirección de x1 y x2?
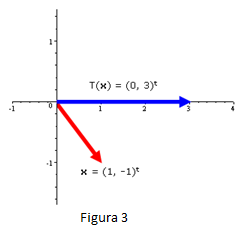
Analizando lo que se muestra en las figuras 1, 2 y 3, se si aplica la transformación T a un vector, las únicas direcciones invariantes (que no cambian) son las de x1 y x2. Cualquier otro vector que no tenga esas direcciones cambiará de dirección al aplicársele la transformación T, como muestra la figura 3.
Para reforzar lo
anteriormente mencionado, se puede recurrir también al sitio de Wolfram
Research referido al Demonstrations Project. En éste se han seleccionado
dos simulaciones que permiten profundizar la comprensión de la
interpretación geométrica de los autovalores y autovectores.
Por medio de los siguientes links es posible acceder a cada uno de
ellos:
http://demonstrations.wolfram.com/EigenvectorsIn2D/
http://demonstrations.wolfram.com/EigenvectorsByHand/